总装图.png
关节机械手.JPG
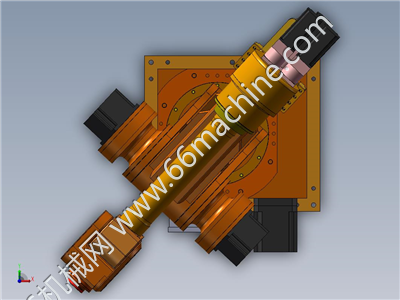
俯视图.png
关节机械手2.jpg
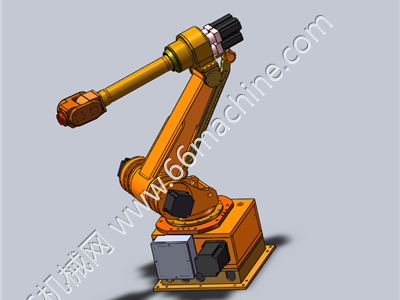
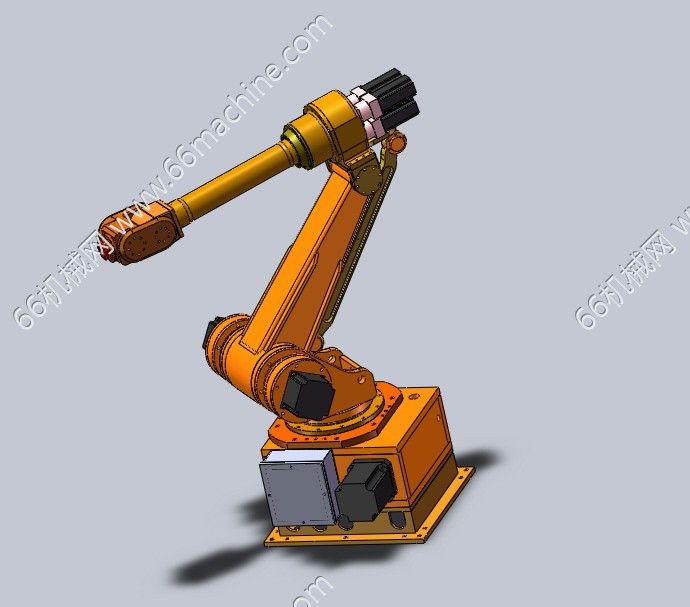
这是一台6 轴工业机器人机械臂(典型的多自由度工业机械手),6 个自由度:J1-J6 轴协同运动,可让末端法兰到达三维空间内任意位置,并实现任意姿态。驱动方式:各关节由伺服电机 + 精密减速器驱动,定位精度高、运动平稳。
妮
图纸ID: 315092070392009445
图纸格式:SLDPRT、SLDDRW、SLDASM、JPG、jpg
图纸版本:Solidworks2021
文件大小:72.71MB
所需积分:15机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人