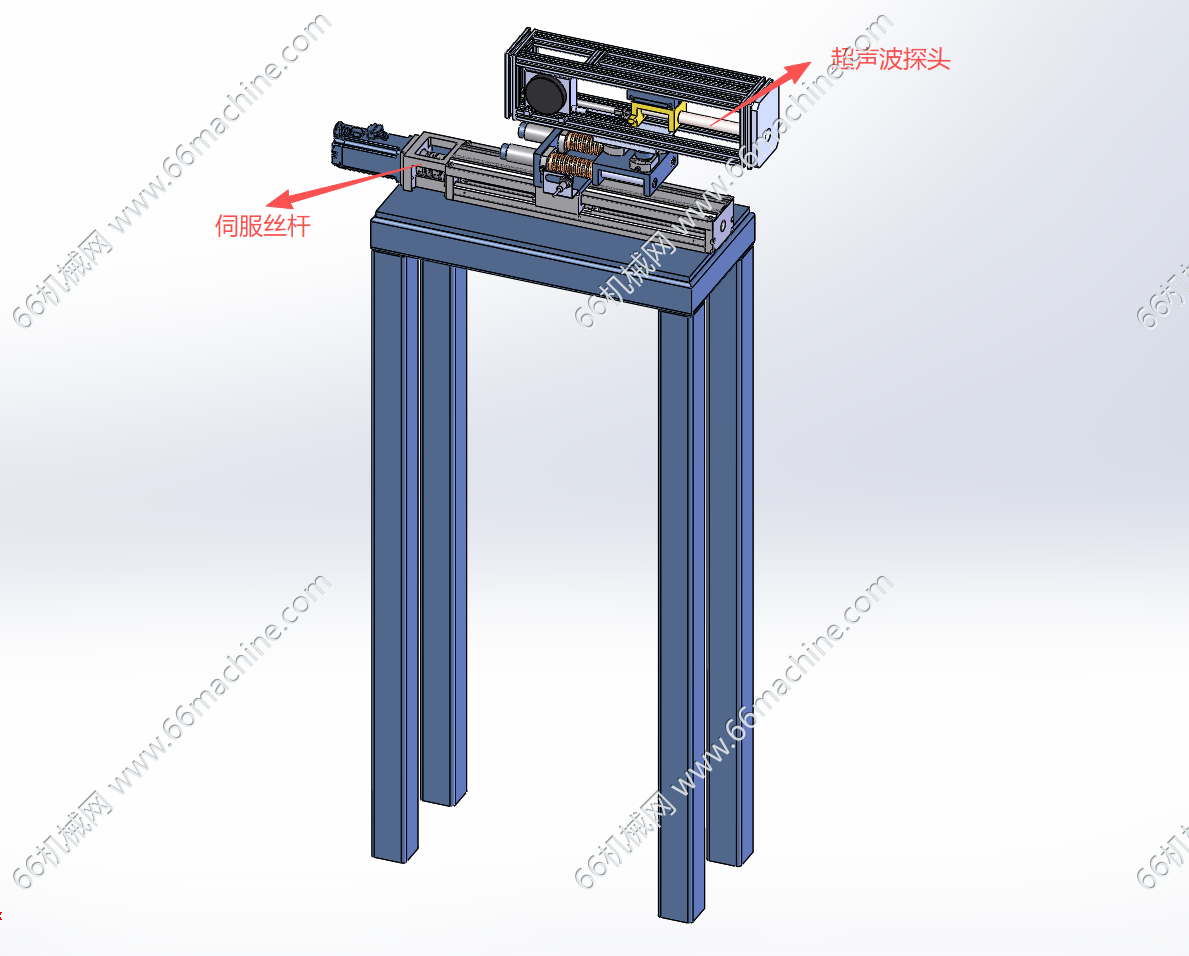
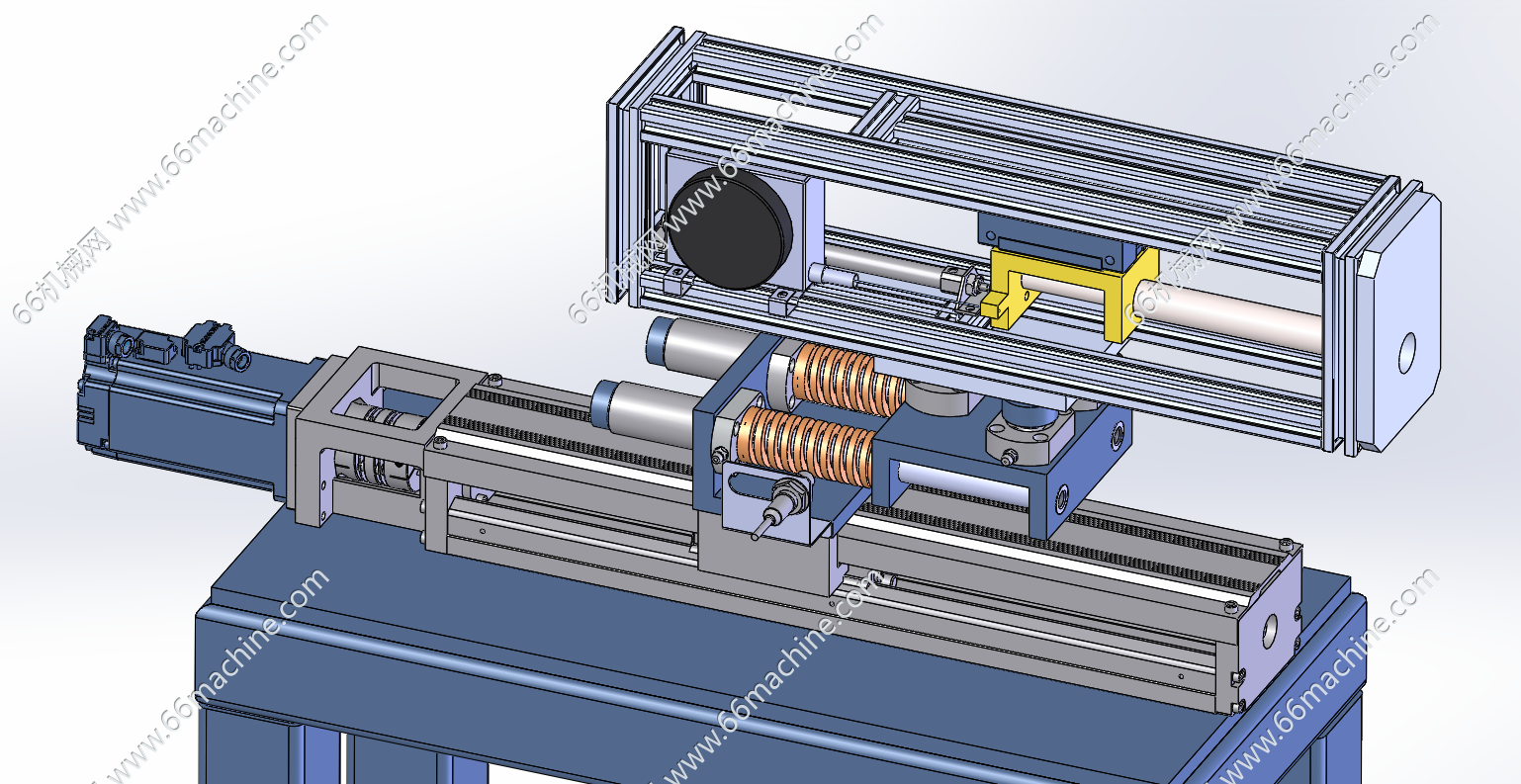
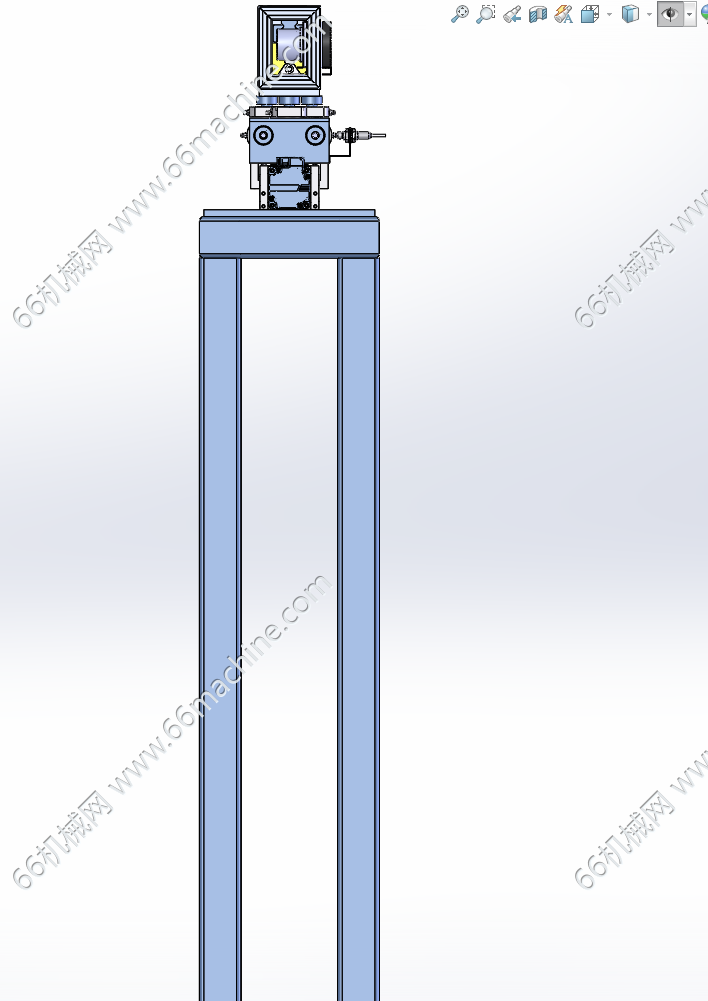
本模型为前后移动超声波测量装置,由移动模组、防爆伺服电机、压缩弹簧、直线轴承、接近开关、球面轴承、拉伸编码器、推进气缸、直线导轨、超声波探头等组成。工作过程如下:当工件就位后,工件两端的测量装置同时工作,伺服电机驱动移动模组滑块移动,带动测量装置整体向前移动,当测量基准面与工件端面接触后,压缩弹簧不断压缩,同时球面轴承自动调整测量基准面和工件端面的相对角度,从而保证二者完全贴合,当弹簧压缩到位后会触发接近开关,使得伺服电机停止向前推进,此时测量基准面和工件表面已经充分贴合,随后推进气缸推动直线导轨滑块向前移动,带动测量头伸入工件孔内,当测量头接触到工件填充物时气缸会自动停下,通过拉伸编码器数值的变化即可测量出落差的高度即孔的深度。